Reflection
The Tabletop Robot is built with four sensors that can detect the surface of a table and once one of the sensors are off the table it will be able to follow a command to drive forward, in reverse, and turn to the left of right. The reason I chose this project is because robotics and electronics has always caught my attention so this was a step towards getting a feel of what I must do.
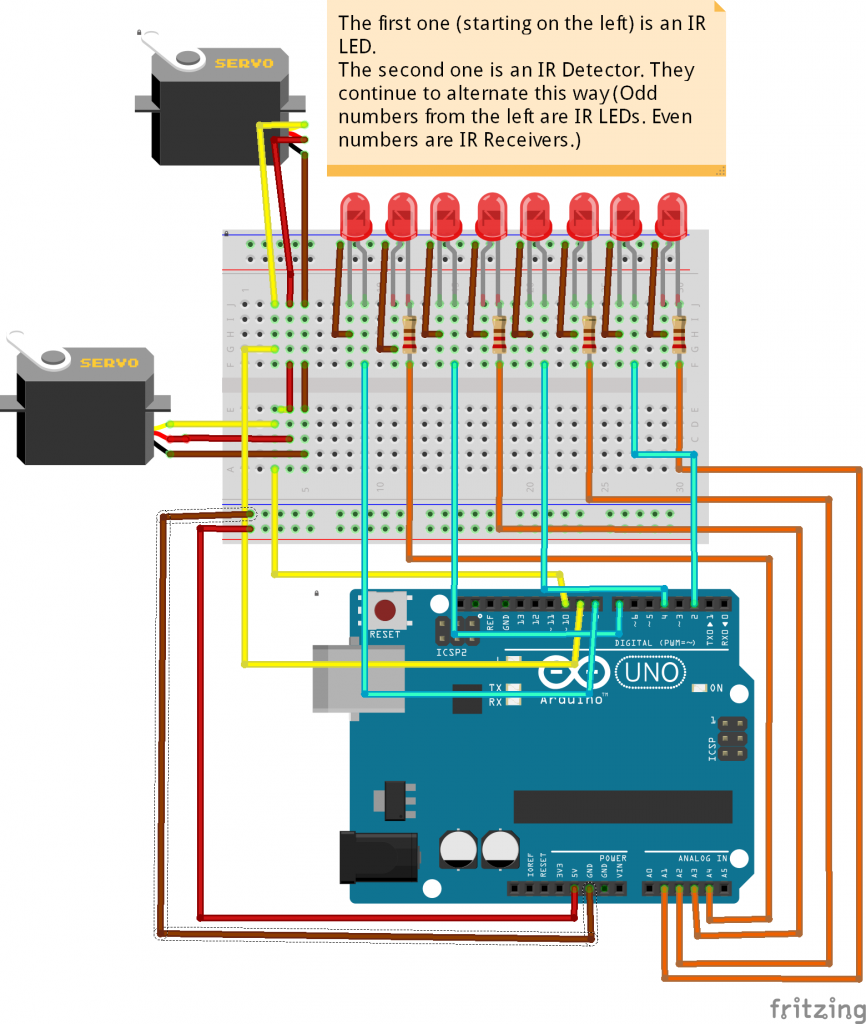
For this project, I was using two continuous servos, which are high powered motors that rotate based on degrees. For example, when the servo is in position 90 it’s not moving versus when it’s in position 180 its going forward and when it’s position 0 its going in reverse. For the sensors, I am using infrared LEDs and Infrared receivers. How the sensors work is that as the LEDs emit IR light the receiver being next to it will be able to detect the light after bouncing off the surface of the table.
One of the most challenging things I had to deal with is the electronic side of things. I could get the code down solidly but I kept having issues with the sensors as the value I was receiving kept going berserk. After countless attempts of changing the circuit to power the servos first then the sensors, I was still having issues. With the help of lead instructor Graham, we could figure out a solution by connecting a wire the vin pin on the Arduino and connecting it directly to the servos. This allows the voltage to go directly to the servos without going through a voltage regulator.
My time here at BlueStamp Engineering has allowed me to understand whether I want to pursue engineering in the future; however, I still do not know what routes in engineering I want to take but my mind is leaning towards mechanical and electrical engineering. Having this opportunity really allowed me to get a hands-on experience in engineering and what it has to offer.
Final Project