Auto-Balancing Segway
The Auto-Balancing Segway is able to keep itself upright at all times, even when the robot is manually pushed
Engineer
Leo S.
Area of Interest
Mechanical Engineering
School
Lynbrook High School
Grade
Rising Senior
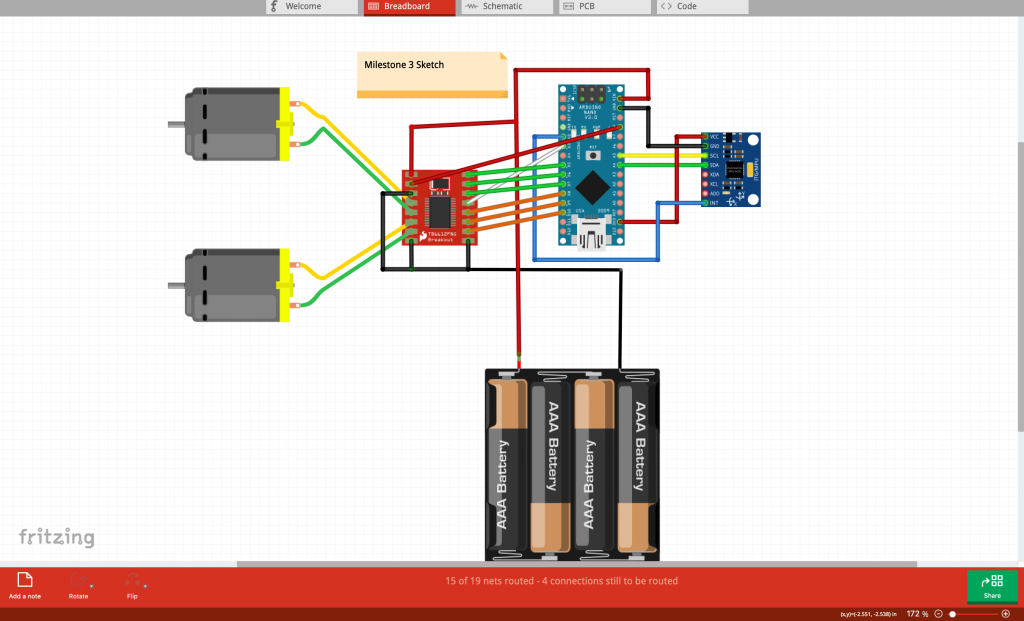
Final Milestone
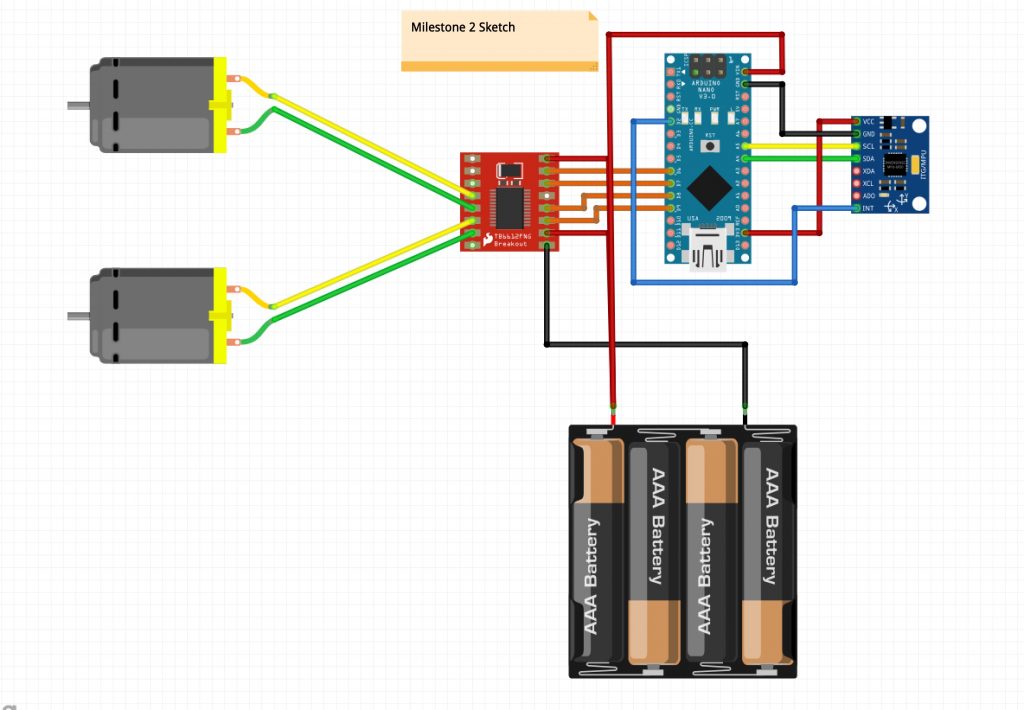
Second Milestone
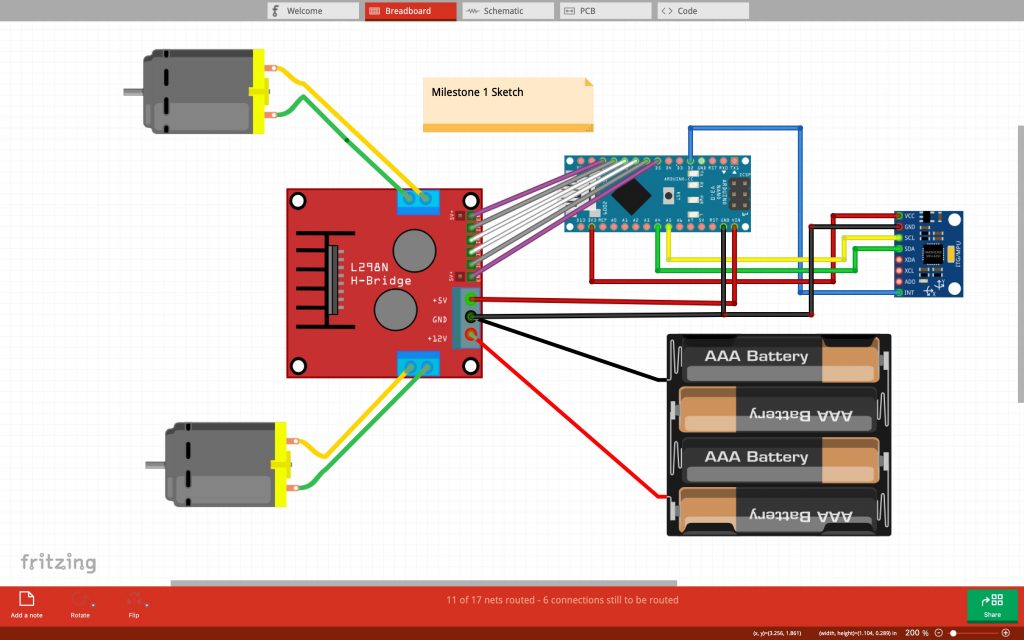
First Milestone