Intro
Howdy and welcome to my page! My name is Keita. I am a rising junior at East High School. A couple things that you should know about me is that I am Japanese and I can speak Japanese, I love to play soccer (I play for East), and I also play the piano. I just started the Blue Stamp program a couple of days ago and for that last couple days, I have been working on Theremin, my starter project. My intensive project is the Hand Gesture Controlled Robot.
Hangesture Controlled Robot CODE
Hand Gesture Controlled Robot Build Plan
Third Milestone
BlueStamp is now coming to an end. My project now functions, but not yet at the level I want it to. I am still having trouble using the button on my glove to switch to claw mode. For some reason the data reading of the flex sensors being sent over from my glove to the robot is very slow. I have tried a couple things with the coding such as changing the delays I have in there and also moving things around within the if statements of my arduino code, but neither of those things helped hasten the processing of the data. If you are planning to make a hand gesture controlled robot of your own, uploading my code (which you can find by scrolling down) will not work. You will have to change the threshold of each flex sensor to suite your own. You will also have to tweak the commands on the coordinator code.



Second Milestone
I have a lot of building since my last milestone, barely worked on computers. I’ve made the wooden base for my robot and gave it wheels too. Trolled wheels are on the back and the motorized wheels are on the front. I have also screwed in the claw right between the front two wheels. I mounted the batteries and have done a lot of wiring. I’ve also hot glued ring-sized rubber bands on the fingers of my glove to hold the flex sensors in place. The flex sensors are all wired up and also taped onto the glove. I can drive my robot, but my code does not yet include the claw.



First Milestone
I have finally gotten my flex sensors to work with my claw and claw joint! I used an Arduino Uno to read the flex sensors. I also finished assembling my claw.
I made the schematic below using the Fritzing program. One of the servo’s below opens and closed the claw, while the other is the elbow of the claw. When one of the flex sensor’s is bent, it opens the claw and when you release it, the claw closes again. The other flex sensor bents the elbow.

Theremin Completion
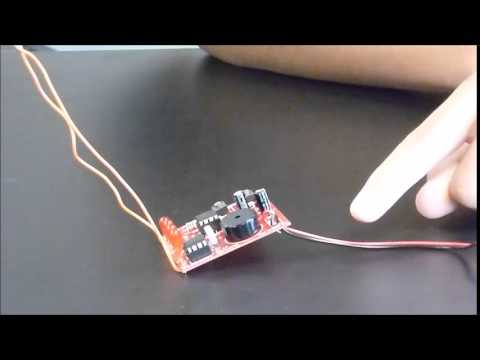
I just finished my starter project Theremin. Theremin is an electrical instrument that is played by moving your hand toward and away from the alternating field around the wire aerial (the orange wire). The piezo (the round black thingy) turns electromagnetic waves into sound. The led’s are only there to show that it is working properly.
The one thing I did not like about it was that it felt like a cookie cutter project. All I did was follow the instructions, assembling and soldering, however I was happy with the outcome which you can see in the video below.