Demo Night
I am really proud of myself and what I did over the past 3 weeks. I was really impressed with myself that I was able to create this robot in a short period of time. My experience at BlueStamp opens up a lot more engineering opportunities in the future and is cementing my dream in becoming a mechanical engineer.
Final Milestone
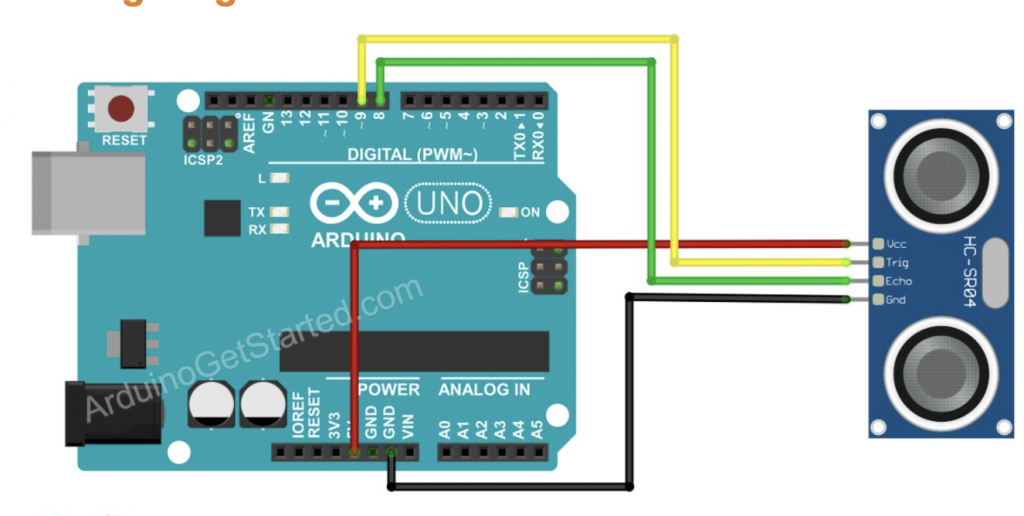
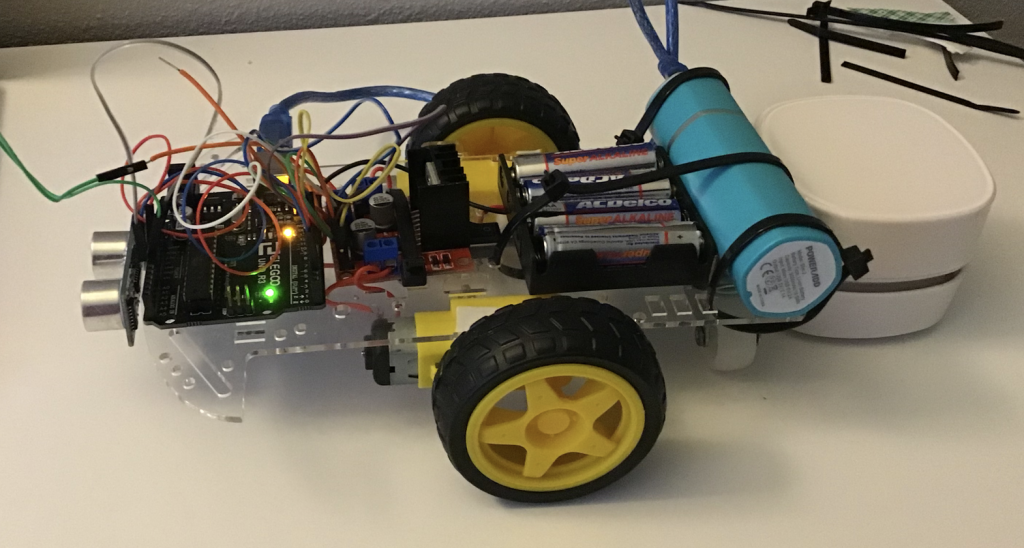
My final milestone for the floor cleaning robot was to rewire all the wires on my chassis, connect the sensor on to my robot, and finally to add the vacuum to the robot. The first step was to solder the wires from the switch and the two motors back to the L298n motor controller. After I had completed the step I added the ultrasonic sensor. The code I used was once the robot is near an object it will stop in front of the object. I used velcro to attach the vacuum to the back of my robot so it is easily accessible. Once the code was tested and it successfully completed the task I had finished my second milestone. My next steps is to utilize the ultrasonic sensor and allow the robot to turn around once it is near an object.
First Milestone
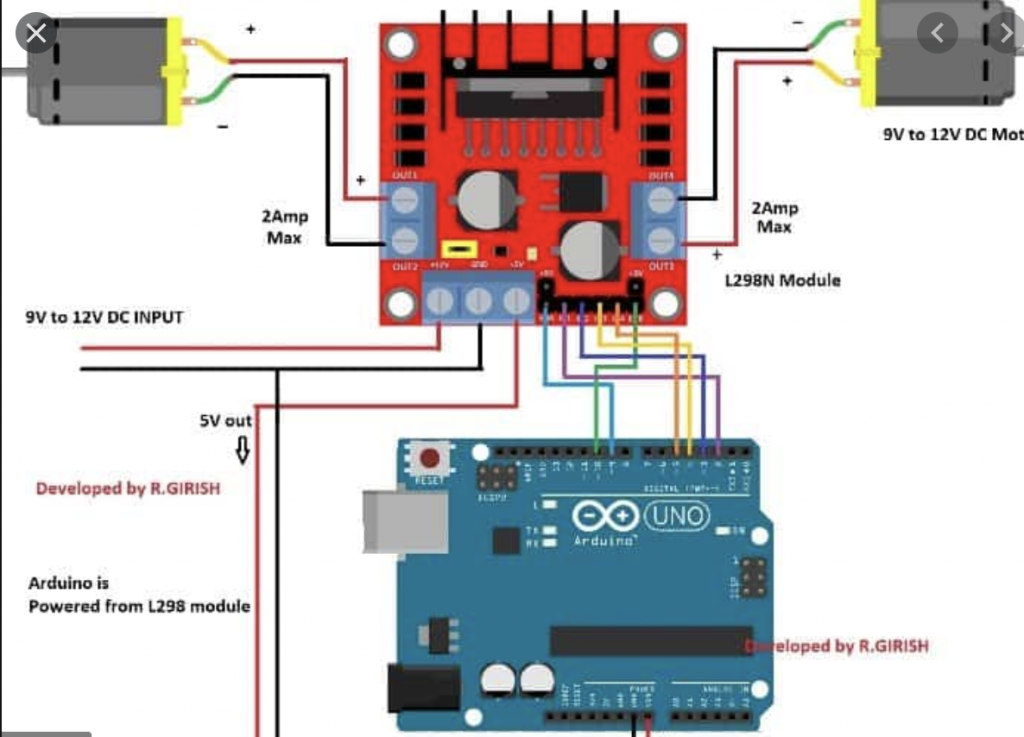
My first milestone was to finish assembling my chassis and connecting it to the L298N motor controller and to the Arduino. My first step was to first assembling the chassis. Afterward I took the L298N motor controller and wired it to the Arduino. After doing this I connected the wires from the L298N motor controller to the two motors at the bottom of my chassis. Afterward, I uploaded a code that allowed the chassis to go in a back and forth motion. After I had uploaded the code and saw that the chassis completed the task I finished my first milestone.