Magnetic Levitation
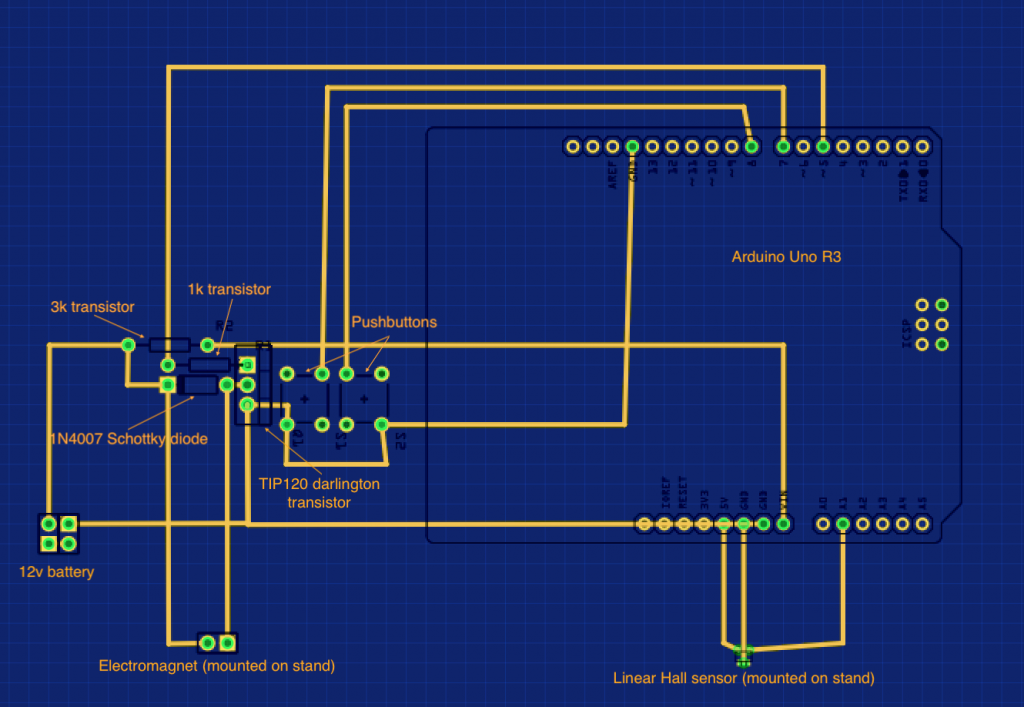
A desk stand that uses an electromagnet and a Linear Hall Sensor to levitate a magnet in place.
Engineer
Benjamin G
Area of Interest
Software Engineering
School
Lynbrook High School
Grade
Rising Sophomore
Final Milestone and Modifications
Second Milestone
First Milestone


Starter Project – Mintyboost
My starter project, the Mintyboost, uses standard AA batteries to power a USB slot for a phone charger. In this project, I had to solder multiple parts onto a circuit board, then wire it to an AA battery case.
While soldering on the parts, I saw what every part did and how they worked, such as how the resistors allowed a larger current to be passed into the board by using resistive materials to bleed off excess current. I already knew multiple things, such as how capacitors store energy in the short term, or that diodes only allowed current to flow one way, but was didn’t know how other parts worked. For example, I didn’t know how some IC sockets protected their chips in addition to allowing you to plug more in, neither did I know that USB slots had four wires (red for positive, black for ground, white for data input, green for data output). There were other things that surprised me, such as how the power inductor, which stores and converts power to a different voltage, was just a coil of wire.
Overall, this project was fun yet educational, teaching me about all the basic electronic parts and the basics of necessary skills like soldering.