Overall Reflection
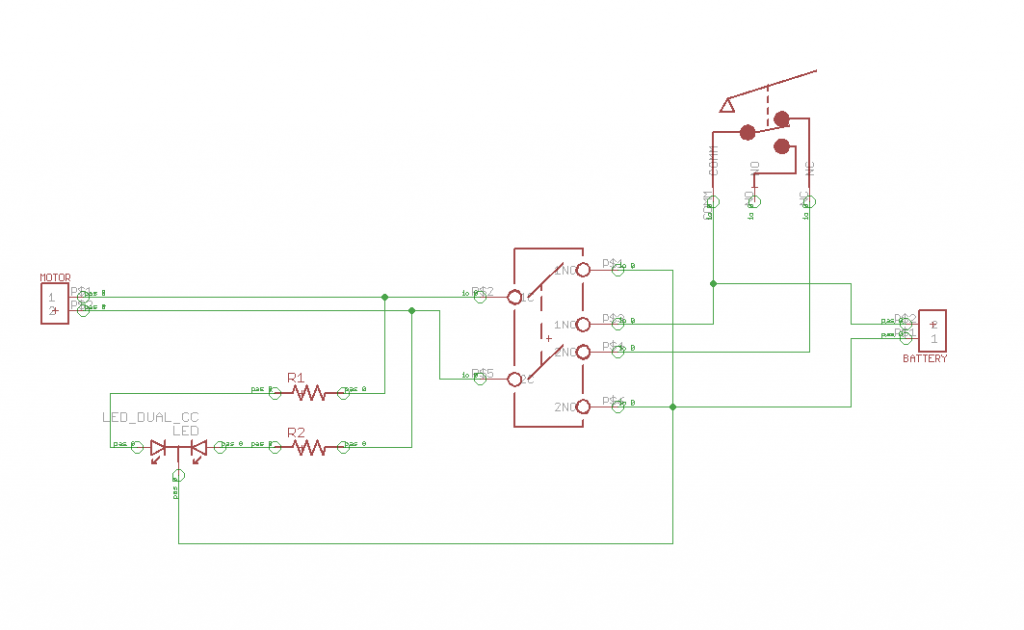
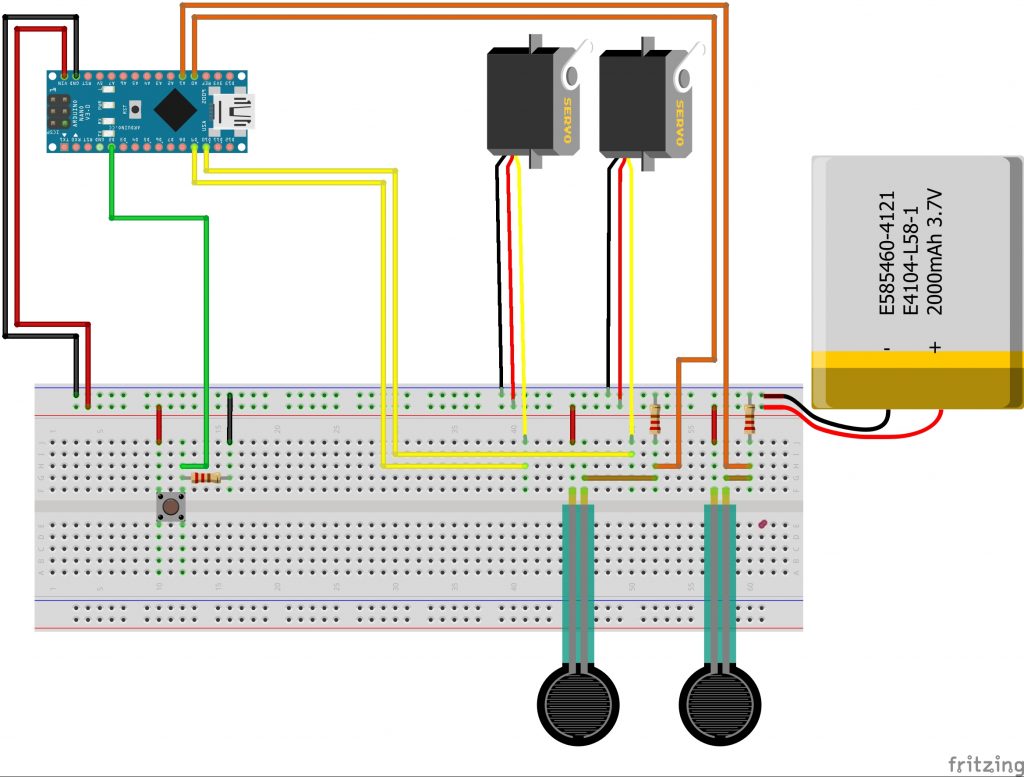
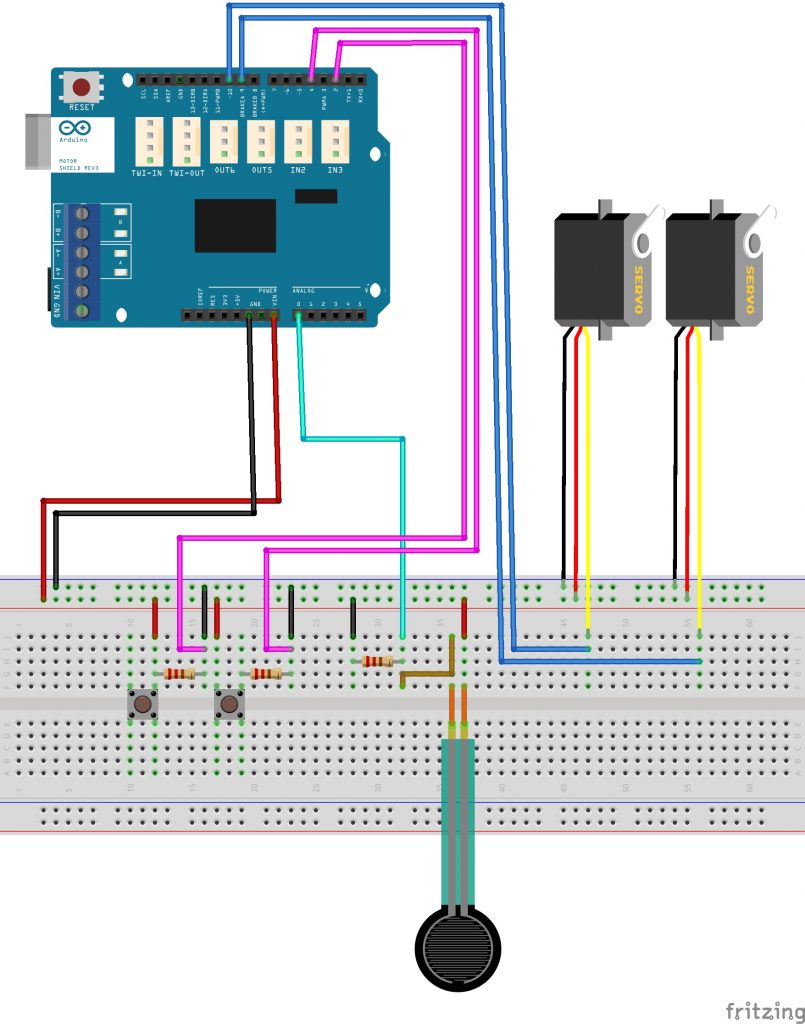
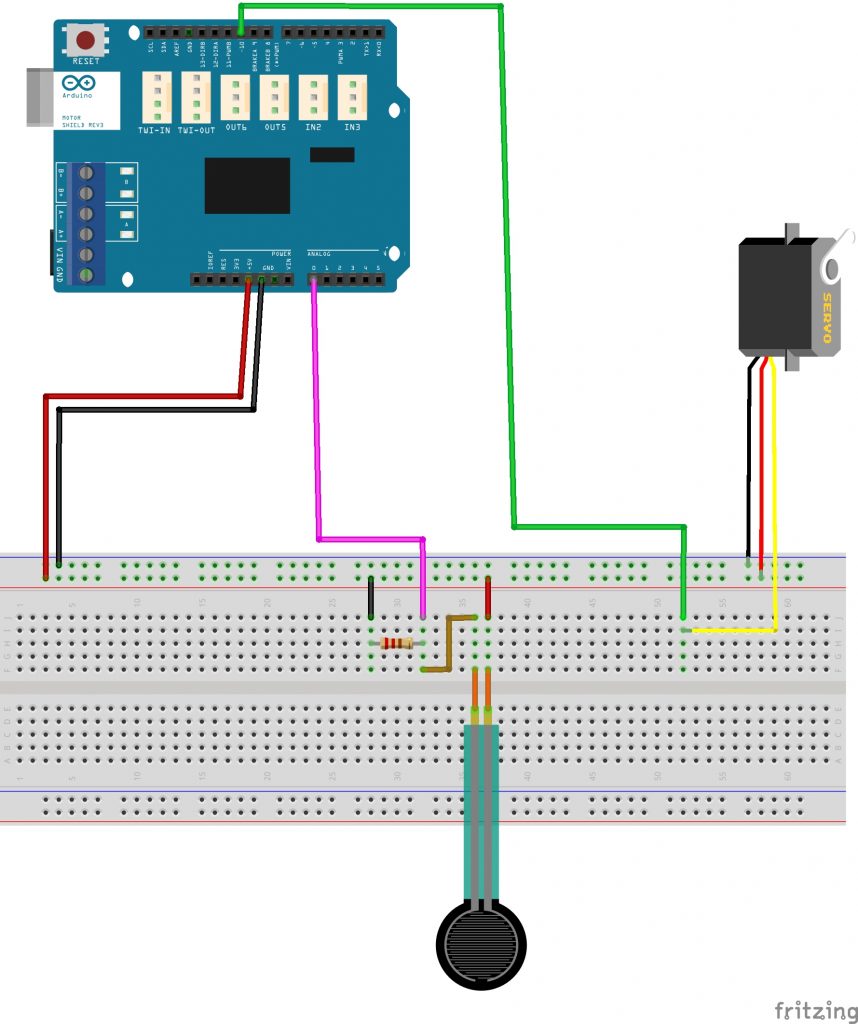
For my starter project I made the useless machine which is a box that turns itself off. The useless machine made me comfortable soldering which made it easier for me to do it when I was working on my main project. For my main project I made the self-lacing shoes which automatically tightens laces of the shoe as soon as you step into it. I chose this project because I really liked the idea of the shoes Marty McFly wore in Back to the Future but I didn’t like the way they looked or that you actually had to press a button to tighten them. So when you put your foot into the shoe, the force sensor on the heel of the shoe feels the force from the foot and the servos start to tighten the laces of the shoes. A force sensor, also known as a force sensitive resistor, starts off with a high resistance value, and as force is applied to it, it decreases the resistance value and allows current to flow through it. There is another small force sensor on the tongue of the shoe. As the laces tighten, the tongue gets closer to the foot and when the foot comes close enough to the sensor, the laces stop tightening. I have also made a state machine in my code which makes sure the laces won’t loosen or tighten while wearing them. To loosen the laces, you press the button which rotates the servos in the opposite direction of which they were originally turning in. This is the self lacing part of the shoe. Another thing the shoe can do is count steps. Every time you step in the shoe, the Arduino counts a step like a pedometer. The most challenging part of the project was making sure that all the wires weren’t connected to each other. While making the PCB, there were multiple instances where things weren’t working because the wires were to close to each other and one time, the servos actually started to smoke up. Throughout the program I learned how to organize wires and make sure the wires weren’t touching. The next modification for my shoe is to have the servos, the battery, and the PCB into this sole that I designed and made with cardboard. Another thing that I want to do is make the connection wireless and have an app that makes it easier to loosen the laces and display the steps, and eventually the distance covered and calories burned. This project was a lot of fun because it was easy to do most parts but there were some parts which were challenging that made me think about what I was doing and why I was doing it. I also liked the way Bluestamp instructors helped whenever I was stuck by not giving me the answer and made me work hard to find the answer myself.
Final Milestone
Second Milestone
First Milestone
Useless Machine