Final Milestone
Code
Materials
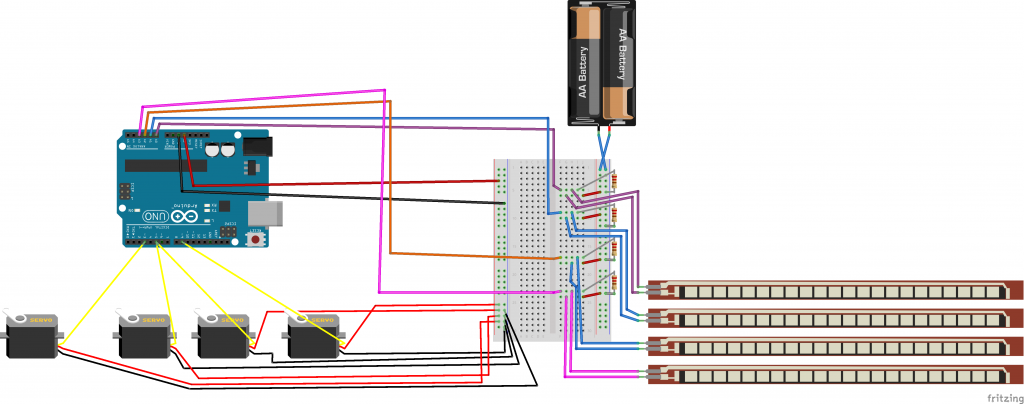
Schematic
This is my second year recap! Thanks for a great second year Bluestamp!
My third and final milestone consisted of finalizing my circuit to support two power supplies and to create a rock, paper, scissors gamemode in my code. I ran into one of my most frustrating problems during this milestone, which was my Arduino shorting out from too much power input. Each pin output was exceeding 20mA and the Arduino stopped working. I ordered a new one and recircuited to make it so my servos were powered by a 6V battery and the Arduinos and flex sensors were powered by a USB charger. Finally, I added my goal modification which was the integration of a gamemode. The rock, paper, scissors (RPS) gamemode was fairly straightforward to code for (code linked below). It uses a simple random number generator to play the user in a game of RPS! The code randomly picks a number from 1 to 3 to determine which move it will make and then maps the servos to show as a rock, paper, or scissor. After finishing my project in the Bluestamp program time window, I feel extremely proud but I am also excited for the future as my engineering skills have grown substantially. I will be to sure to update my project and I’ll check back here when I do!
Second Milestone

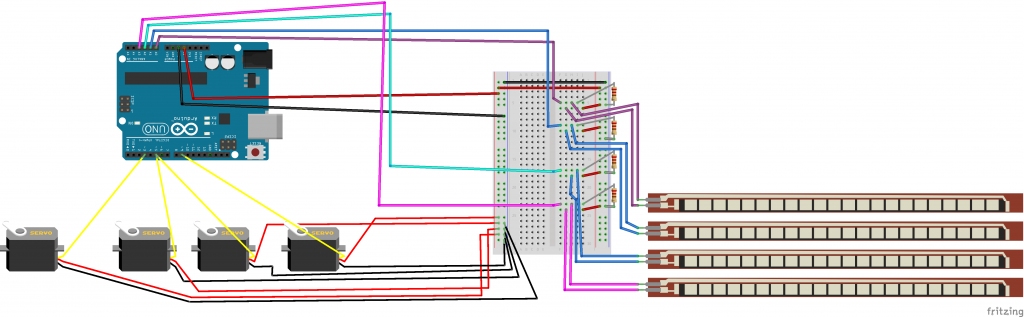
Figure 1: A Fritzing diagram of my new circuit can be seen above
First Milestone

I completed the first milestone for my 3D Printed Prosthetic Hand! I began by screwing my servos into the base of the hand, completed a functioning circuit with the servos, flex sensors, and Arduino uno, and completed the code which successfully mirrored the flex sensor activity on the functioning servos. I first screwed my servos into the base of the hand which was very simple. I then had to research and learn about the flex sensors and servos, specifically on how to use them with Arduino. After doing this, I began to code simple exercises with the servos and then I moved on to coding my main project. Some of these simple exercises include Arduino examples and instructable code. At the same time, I started constructing a circuit for the flex sensors and servos. I went through my circuit and code many times and had to recreate both at least three or four times before I finally completed my first milestone. I had to restart so many times because of my lack of knowledge with resistors, I continued to put them in the wrong spots and it would always the voltage of my project all over the place. The struggle I had with my code was probably the largest challenge I had to come over during my first milestone. I was constantly trying to include more efficient code, but that code, most often then not, messed with the other parts of my Arduino script. I had to find the perfect pieces of efficient code that didn’t mess up all my work so far. I feel like this milestone has been really important to my development as an engineer because this project has proved itself as challenging very early on. I have learned to control stress and frustration, all the while becoming a better troubleshooter and coder.
Starter Project
For my starter project I built the MintyBoost portable charger. The charger has a variety of resistors, diodes, capacitors, a battery compartment, and other parts. The battery compartment is the power source to charge the phone. The capacitors store electrical energy to stabilize any changes in current flow and the resistors control amount of current flow. Diodes only allow current to flow in one direction. The diodes used make sure current only flows from the battery to the phone and not the other way around. The specific IC chip in this amplifies DC currents while the inductors in the MintyBoost convert low voltages to high voltages. Because there is a IC hub on the circuit that holds individual IC chips, the replacement of a IC chip with another can increase or decrease the controlled voltage of the MintyBoost charger. Some issues I ran into while making this was desoldering the wires when I thought something was wrong with the soldering but instead the issue was dead batteries. Aside from that, the only other problem faced may have been having to check multiple times to make sure all the parts were in the right place in the right position.