
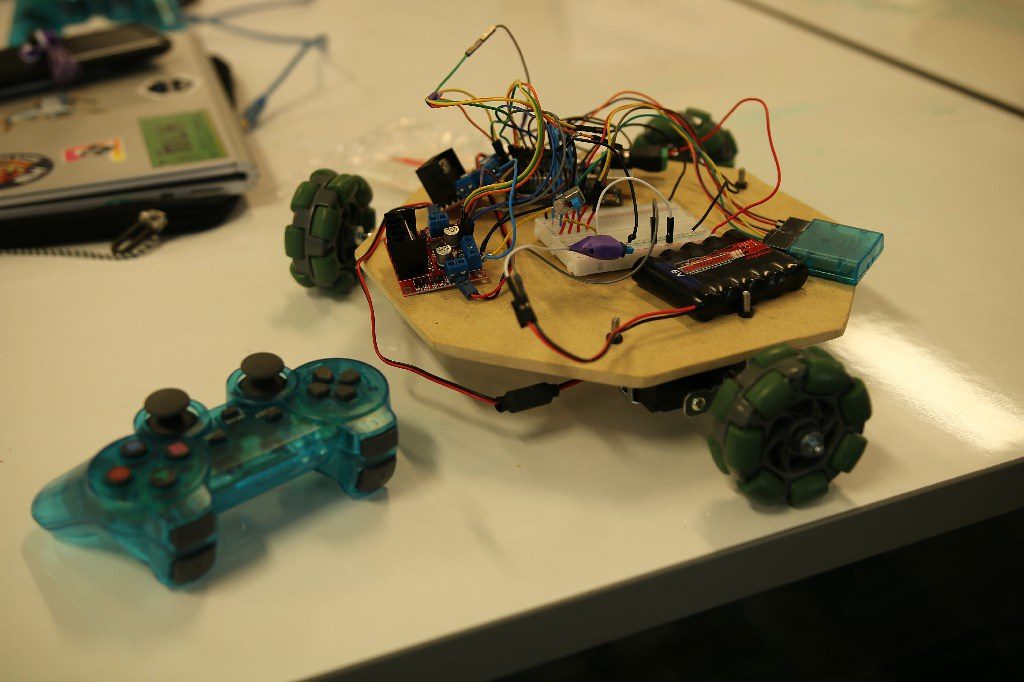
Omnidirectional Robot
The omnidirectional robot is driven by an Arduino and 3 motors. Because motors are located in different planes they are able to not only rotate the robot but also drive it in one of 8 directions.
Engineer
Vadim K
Area of Interest
Software Engineering
School
Galileo Academy of Science and Technology
Grade
Incoming Senior
Second Milestone


First Milestone
For my First Milestone I decided to ensure that my ps2 controller could communicate with my Arduino. The Arduino has PS2X library installed that, although poorly documented, is well made and in the latest version only takes a single line of code to set up. On the physical side of things, the Arduino and ps2 controller only need a couple of wires, of which most important are data, clock, and attention. This setup doesn’t only allow for one way communication, from the controller to Arduino, but also for communication from Arduino to the controller.
Starter Project
My starter project is a Useless Machine. Its point is to be just that, useless. Whenever the switch is pushed forward, an acrylic arm comes out to push the switch back.
Demonstration
How it works
The useless machine only uses simple wiring. Whenever the switch is pushed forward it allows for connection between the battery and the motor, causing an acrylic arm to rotate and push it back. When the switch is pushed back, it reverses the current and allows the acrylic arm to rotate back. When the acrylic arm rotates back far enough, it eventually hits the switch on the other side which cuts off the current until the lever is pushed again.
Useless Machine Schematic
