Kenny S.
My name is Kenny; I am a Xavier graduate. My starter project was the Mini POV4. My intensive project, inspired by Caitlin B, is the Knee sensor suite that could measure the angle of one’s knee and the acceleration. Throughout my high school career, I was, and still am, very into physical activity. I chose to do the knee sensor because during my experience on the Outdoor Track and Field team, I was taught that precise form is key for becoming faster. The knee sensor could help improve running and exercising form and also physical therapy.
Engineer
Kenny So
Area of Interest
Computer Engineering/Electrical Engineering
School
Stony Brook University
Grade
Incoming Freshman
Reflection
Prior to most students, I came into BlueStamp with minimal knowledge on engineering. I had only taken a robotics course that helped me understand the fundamentals of creating and programing a lego-based robot. As I entered the BlueStamp classroom for the first time, I was overwhelmed by the plethora of bundled wires, fine tools, and unfamiliar pieces of technologies. As the program emphasizes on self learning and discipline, there was no way I was going to finish my project with such little knowledge and patience — or so I thought. After my initial sense of fear kicked in, however, a feeling of excitement and vigor took over my mind and led me to work hard. The exposure to such a lively and productive environment inspired me to be the engineer I want to be. It was a rough beginning, but soldering, circuitry and (most importantly) researching became second nature to me. I learned slowly that, in a practical sense, everything is possible. If there was a seemingly impossible procedure I wanted my project to carry out, there was always a way around it exemplified in the creation of my hand made bend sensor. While BlueStamp has led me to become a proficient and knowledgable engineer, the technical skills can be acquired anywhere where there is resource for learning (for better or worse). However, in terms of developing necessary values and personal growth, the BlueStamp experience has been irreplaceable. I am more open to self learning and have realized my responsibility to learning. Instead of hesitating when exposed to something I am unfamiliar with, I am now eager to learn anything and everything. Overall, through my time at BlueStamp I have grown into a more proficient engineer and matured person.
Final Milestone
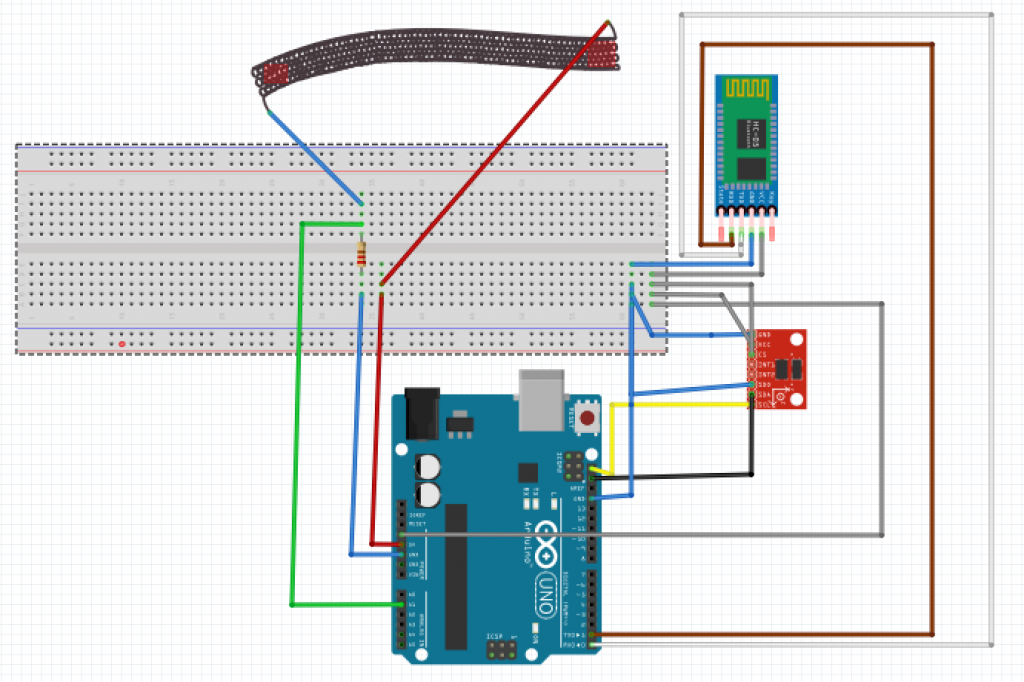
The last part is setting up the code. Initially, I was confused how to set up bluetooth in the code: Did I just need to find an example and put it in my own code, or was there a function for bluetooth throughout the code. After some research I discovered the ‘SoftwareSerial’ library that helped set bluetooth commands for data to be relayed onto my computer from my Arduino. The greatest obstacle (arguably of the whole class) was working with a malfunctioning bluetooth chip. Initially, the bluetooth chip I was working with could not connect to my laptop easily and when it did, no data was being transmitted for the Arduino. After weeks and weeks of debugging, I tried using a different accelerometer and discovered the source of the problem. The simple solution was buy a new accelerometer from a reliable store. In my final milestone, I will be attempting to portray the data from Arduino onto processing graphs.
Second Milestone
First Milestone
