Third Milestone
Second Milestone

First Milestone
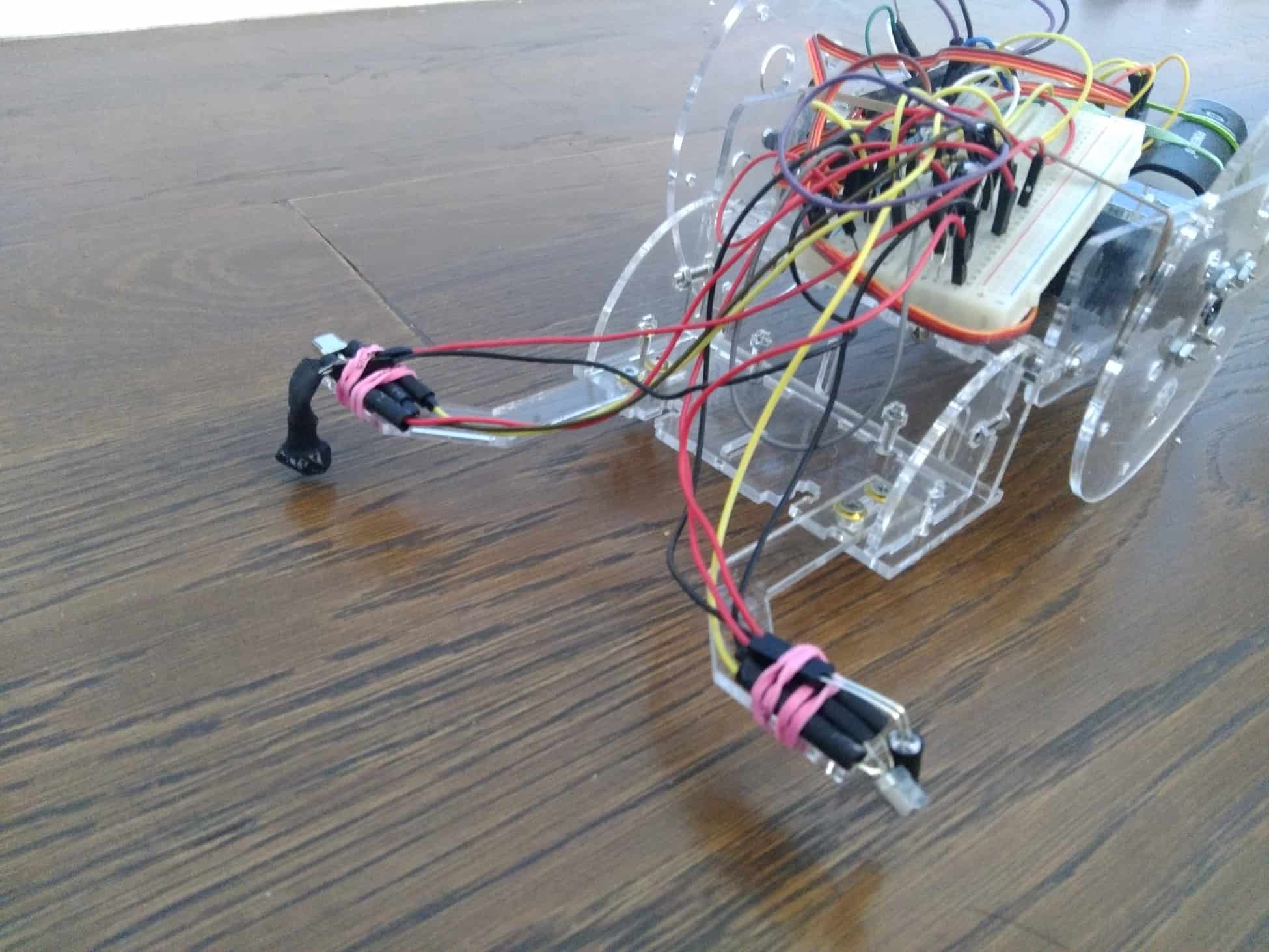
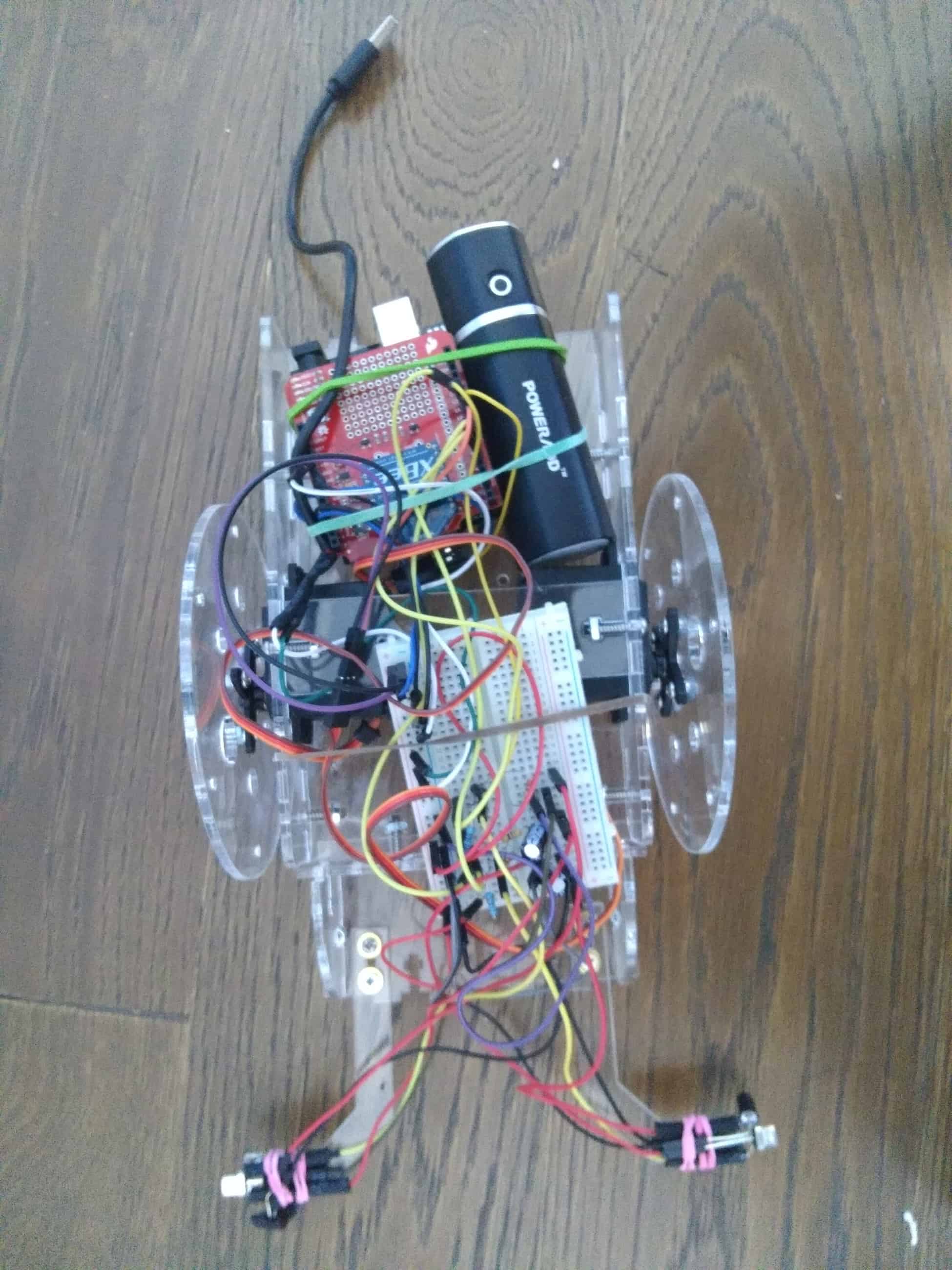
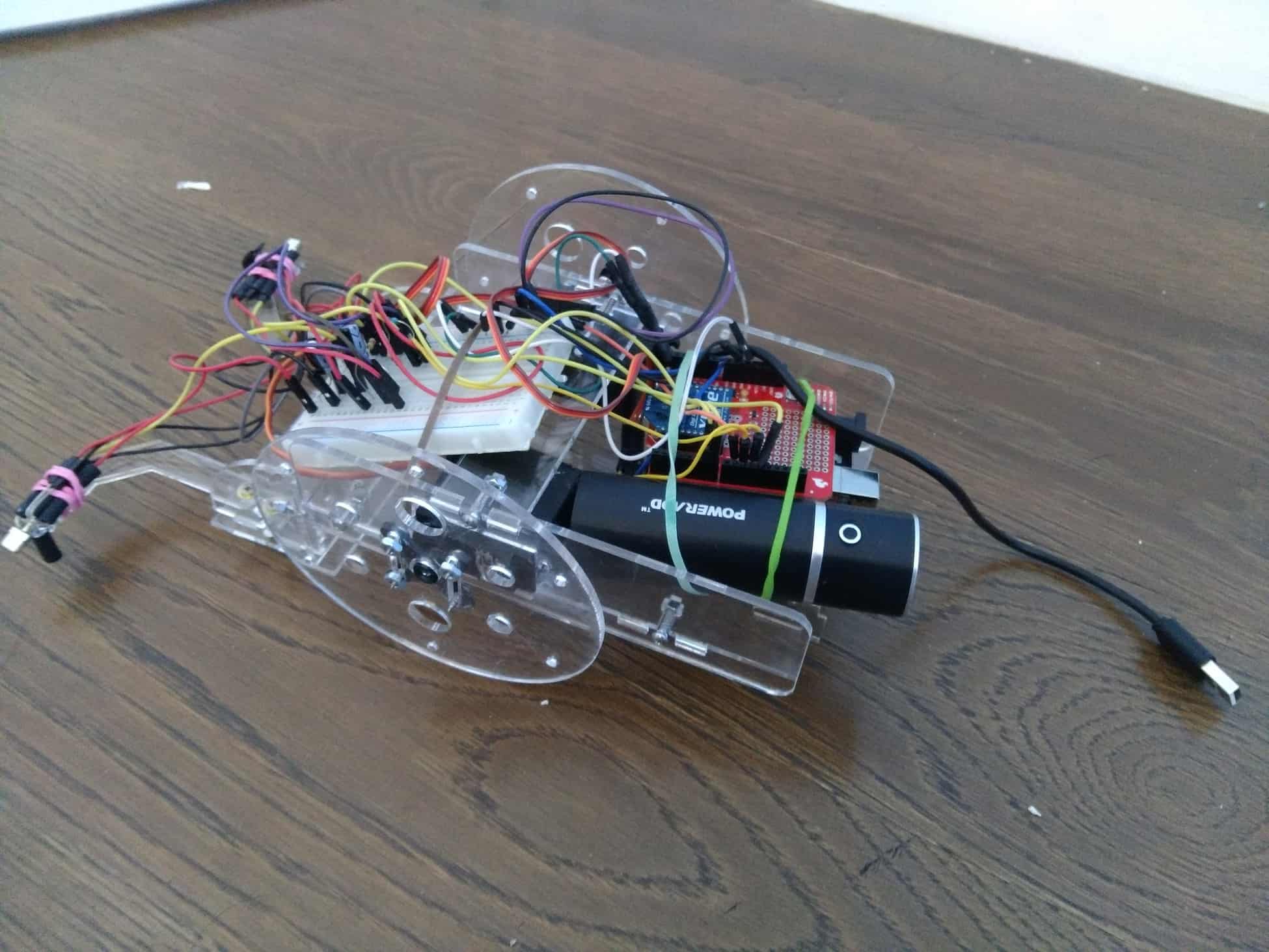
My intensive project is Tabletop Robot. For this milestone, I worked out most of the circuit for my project. I connected one pair of IR detector, IR emitter, and servo to my project. For my detector, the power is connected to both an analog pin on my servo, and the ground. However, a diode is between the ground and the power, and that is my IR detector. If the detector is not receiving any IR light, it won’t allow any electrons to pass through, therefore the analog pin will receive five voltage. If the detector allows electrons to pass through, the analog will receive lower than five voltage because some of them go to ground.
Starter Project
My starter project is Mintyboost. It is a charger for mobile devices which uses two AA batteries as power source. It contains a circuit board, a battery holder with two AA batteries, a boost converter chip, a power inductor, an IC socket, 5 resistors, 4 capacitors, a diode, and a female USB jack. All of these components have to work together for Mintyboost to work. The batteries provide the energy to charge the phone, they are connected to the board through the holder. The batteries have a three voltage output, however, the USB port uses a five voltage output. In order to charge through the USB port, a conversion of voltage needs to take place. There are two components involved, boost converter chip and power inductor. Power inductor is a coil of wires, whenever electrons pass through, a magnetic field would be created and stores all the energy inside. The boost converter has two modes: current mode and burst mode. It switches the mode, and with the inductor, they store the power passing through, convert it to five voltage, then generate it out.