Final Milestone
The project that I will introduce to you here is a remote access robot tank, which I have given the designation NK-17 to differentiate from other projects of similar nature that I may work on in the future. The NK-17 Remote Access Vehicle is a small robot that is capable of fitting inside of a shoebox that runs on a 9v battery and receives wireless input from a separate control box connected to the computer via serial monitor via nRF24L01 transceiver modules. Operation is relatively simple at this stage of development: An input for the left and right track are sent via serial communications where it is transmitted to the robot, which interprets and acts upon those instructions using a pair of DC motors. While the capabilities are relatively limited at this stage, this platform is highly customisable and opens many possibilities for future improvement.
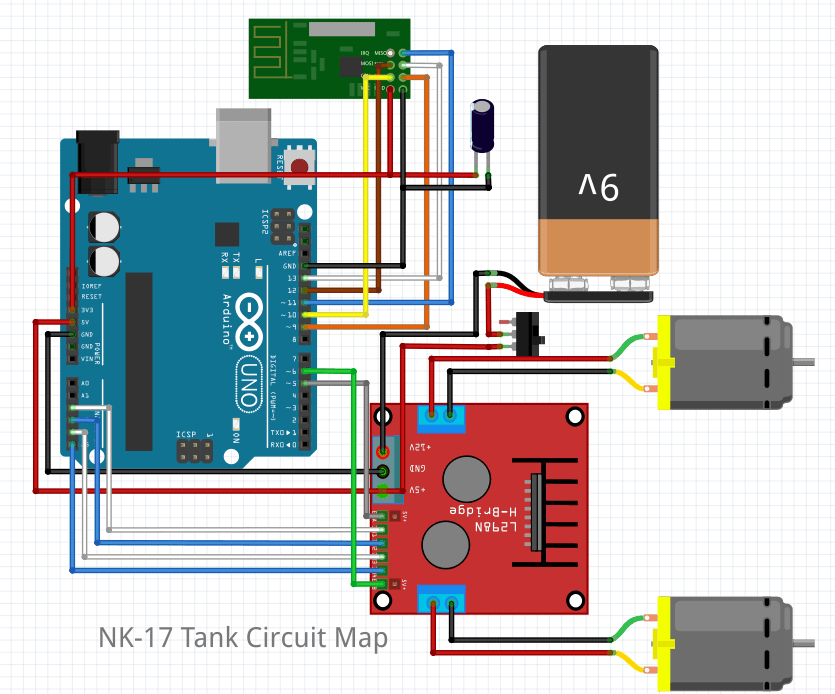
After completion of the second milestone, technical difficulties with the nRF24L01 transceiver modules continued to persist, but eventually a steady effort resulted in a successful transfer of data once again, after two hardware failures that occurred after success was seemingly achieved. As the vast majority of the time was spent working with the transceivers, not much was done to improve the rest of the robot, but solutions were implemented that increased the reliability of motor control (via the L298N H-bridge motor controller), increased the structural integrity of the robot as a whole, and reduced the rate of track failure to almost nothing (thanks to various fixes regarding the gearbox, suspension and track tensioning, and the implementation of looser axles that exerted less unnecessary force on the tracks). The power supply was switched from a 5V portable power bank to a 9V battery, which enabled the robot to run at much higher capacities, and wire reallocation opened up various ports for future additions. Thanks to these various fixes, I was able to put together a structurally sound, somewhat reliable robot that was able to respond to commands sent from the computer. Thus, the remote control tank was completed.
Robot Electronics Circuit Schematics
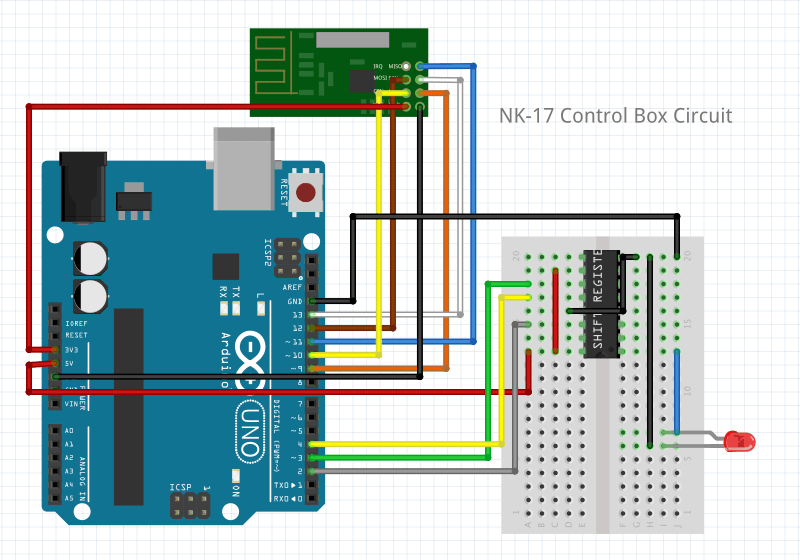
Control Box Electronics Circuit Schematic
Links:
[Code used for project on Github.]
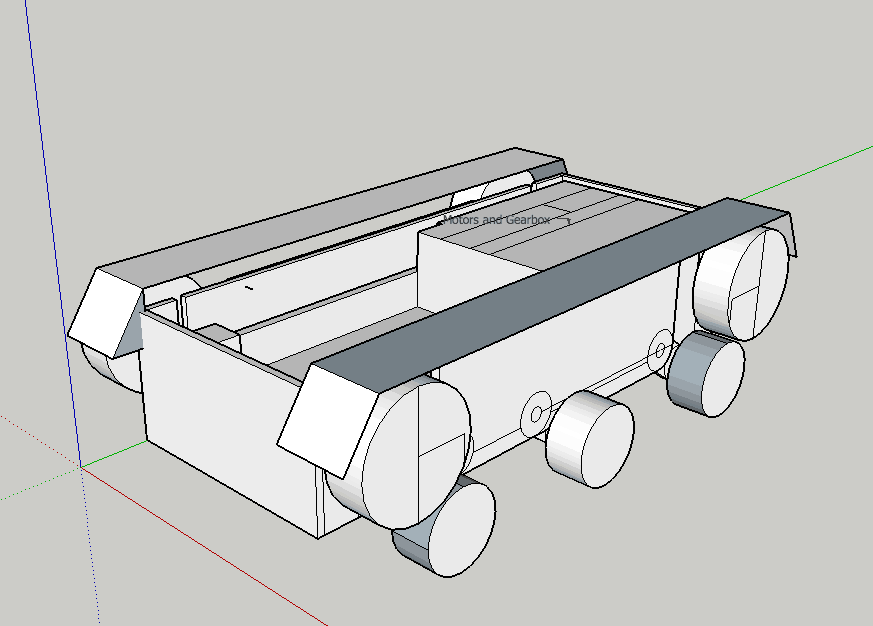
[CAD files of various aspects and components of the project.]
Image of CAD file used to design project
Second Milestone
First Milestone
My first milestone included the completion of the first step on the road to designing a remote-controllable tank: establishing a viable connection between the arduino and the PS2 controller. This is important due to several reasons, such as enabling proper testing of all systems created in the future with greater ease and accuracy for future consideration (for the final product). This task was completed according to expectations via the installation and operation of a PS2 receiver library while wiring. While there were at first problems with the reliability and power of the receiver when connecting to the PS2 controller, the issues were quickly remedied by switching the input voltage of the controller from 3.3V to 5V. A simple code was created translating controller output into the movement of a single motor to test the connection and receiver systems, and was met with success.
Starter Project
My Starter Project was a theremin, an early electronic instrument patented in the 1930s by Léon Theremin. Throughout the project I improved upon my soldering techniques while soldering the joints on the pre-etched board and components that were provided to us; while at first the joints were slow to create due to the distance between the part of the joint being heated and the application point of the solder, later joints were completed much faster as a result of more precise and appropriate application of solder and the solder iron. There was little issue throughout the construction of the theremin; everything went accordingly to plan, and although there were a few issues at first with research on the working principles of the theremin, progress was relatively smooth over the duration of the project.
The theremin produces a sound with a varying pitch, governed by the proximity of grounded objects, an operator’s hand being among one such grounded object. It works on the principle of capacitance and its various effects on an electronic circuit; the NE555 timer integrated circuit produces a regular oscillating current that runs through the antenna, which in this case acts much like a capacitor: as the grounding plate (the operator’s hand, in this case) approaches the antenna, capacitance increases and affects the capacitor’s impedance of the oscillating current being run through it as well as the frequency; this system eventually produces a signal current that is run to a small PIC microcontroller which processes and translates the signal into an oscillating current suitable to operation of a piezoelectric element, which produces the sound. The processes that govern this can be controlled by the two buttons located on the board, causing the microcontroller to switch between two modes (discrete and indiscrete) and switch octaves (when in discrete mode).
The importance of this project is educational rather than being particularly functional (other than as a novelty) due to the quality of the product, but in this purpose it has served exceedingly well: while it is one thing to simply assemble a theremin given a set of instructions, the task of understanding one is a rather difficult one which presents plenty of learning opportunities. While prior to starting the project I had only known rather basic operators and models such as voltage, current, and resistance, throughout the duration of the project I gained better understanding of the principles of capacitance, permittivity, inductance, electromagnetic waves, frequency manipulation, and impedance, among other various principles fundamental to electrical engineering.