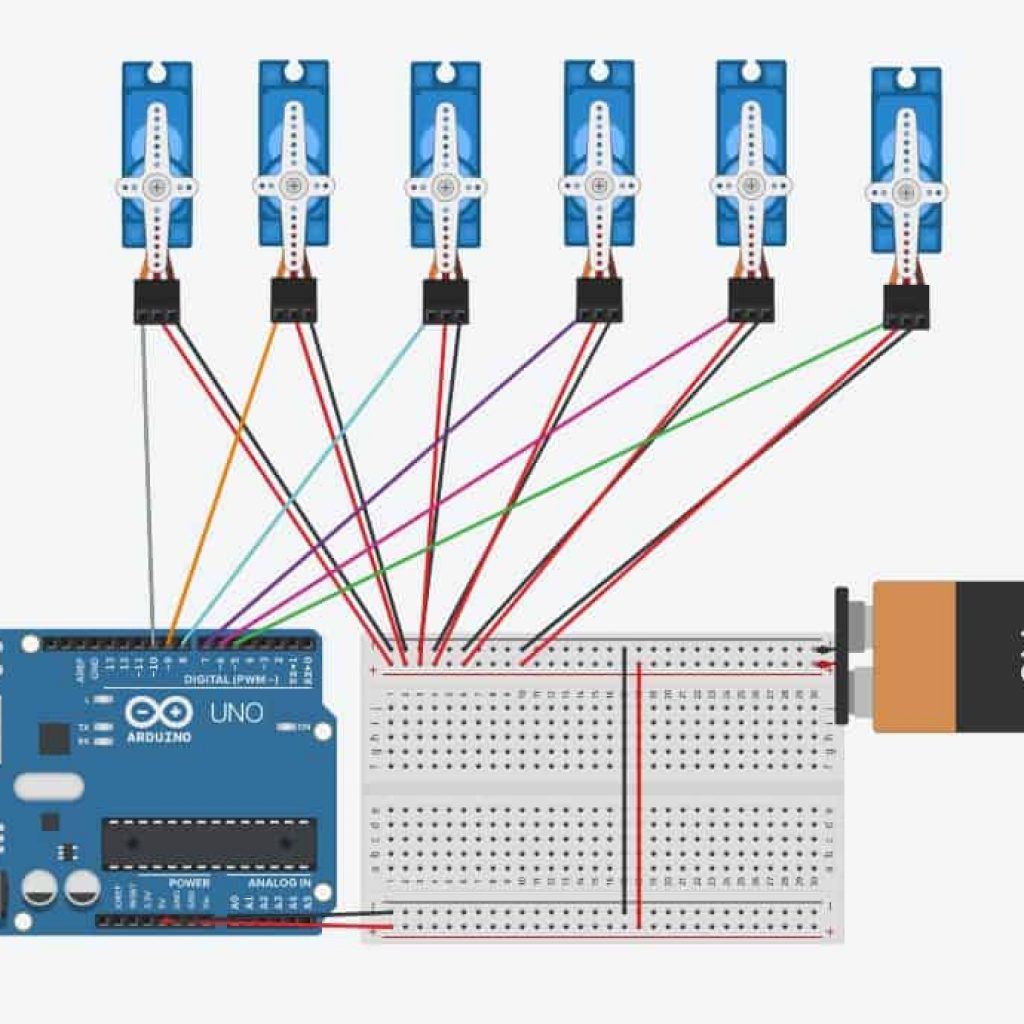
My First Milestone for the 3D Printed Robot Arm is to have all the parts of a working arm connected. This consists mainly of three parts, the code, the wiring, and the arm itself. Creating the program that controls the arm was an amalgamation of original code and programs other users have built in order to create the best program that will work with the parts I have. The wiring was a simpler process, just a matter of finding which wires needed to connect to which servos and which places need to be connected to the Arduino, then solder it all together. Finally, the arm, creating this consisted of hours of 3d printing and a few more using nuts and bolts to hold all the parts together. When all three parts were combined, a robotic arm came alive