Introduction
Hi my name is Deja. I am a rising junior at KIPP: Sunnyside High School and I am a 2nd year student at Bluestamp. This year I decided to build something more challenging for my returning year, an omni directional robot. Here are my milestones and documentations for the building process. If you like to see documentation of the Solar powered speaker project I built last year, here is the link:
http://bluestampengineering.com/portfolio-view/deja/
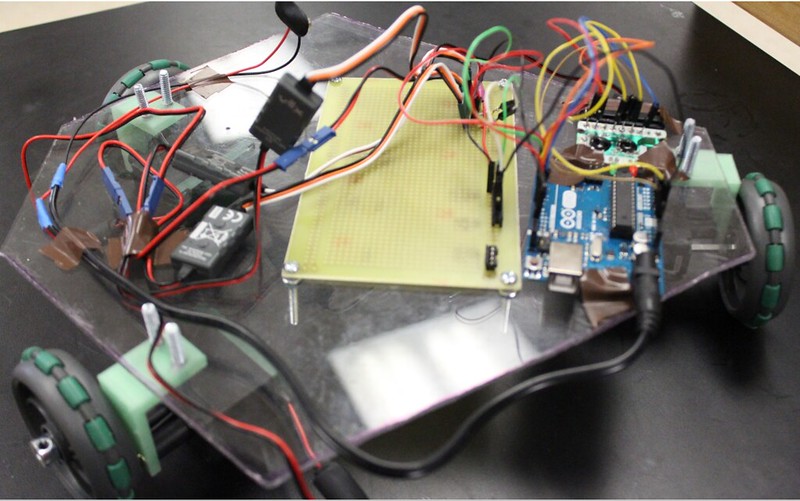
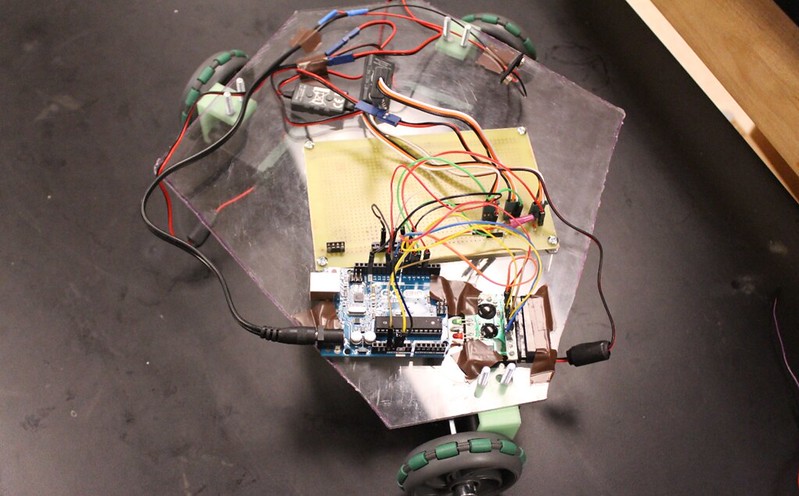
Here are the pictures of my robot:
When I started the project this year, I was extremely nervous about figuring out how to start the project and finish because I never made anything as challenging as an omni robot. The first 3 weeks were strictly dedicated to coding. This is the first time I ever programmed with an arduino, so the vocabulary that was being used was very confusing and it took me a while to understand. After Bluestamp, I plan to read more about coding because I would like to pursue a career in robotics and it will be very important to know programming.
For the next 2 weeks, I built the structure which was the easiest part of the project. I did run into coding problems while testing if the robot was fully functional. The analog sticks on my PS2 controller was not being found by the arduino, but the other buttons on the controller was being found by the arduino. After being faced with this problem multiple times, my instructor helped me and it became fully functional. My 2nd year at Bluestamp has been far more challenging than my 1st year, which made the experience better for me.
Here is my final video:

Documentation
Here is my 3D model:
 ,
,

Here is my schematic:

Here is the CAD drawings I did for my motor mounts:

Here is the Arduino code I used for my robot:
For coding, I had help from Rain, a former student of BSE who also built an omni robot. Here is a link to her page to check out the work she has done:
http://bluestampengineering.com/portfolio-view/rain
Here is my BOM:
Omni robot :Milestone #2
For my second milestone, I finally got my PS2 controller to configure with the arduino and control the motors. I didn’t download the PS2X library to my computer, therefore, the controller could not be found by the arduino, so I downloaded the library and it started to worked. I received help from one of my instructors, Sai, and a former NY BSE student who also created the omi robot last year, Rain. A challenge that came across after my milestone was that one of the motors did not move simultaneously with the other two motors, instead it moved on its own. After checking over my wiring, I realized that I had to connect another ground jumper wire to the arduino from the motors’ power supply on the breadboard. After making that adjustment, all the motors moved how I wanted it to using the controller.
Here is my video:

Omni robot : Milestone #1
For my first milestone, I successfully created an arduino code using the help of Rachel, my instructor, to make all three of my servo motors to move. Since this is my first time programming, I faced many challenges making the codes and understanding the vocabulary being used in arduino. I also had difficulty finding a good schematic for the omni robot to use as guidance. Next, I will configure the Ps2 controller with the arduino so I can control my motors to go in any direction I want.
Here is my first milestone video: