Obstacle Avoiding Robot
The obstacle avoiding robot is a robot car that moves around and avoids anything in its way. It can also be controlled by a PS2 controller
Engineer
Junnuo Z
AREA OF INTEREST
Electrical Engineer/Medical Engineer
School
Lincoln High School
Grade
Incoming Sophomore
Final Milestone
Second Milestone
For my second milestone, I added an ultrasonic sensor. This marks the completion of my base project. I added the sensor to the front of the car and all that was required was plugging it into certain pins onto the Arduino. There were not much issues. The only issue was the wiring because I did not organize it and so it was a mess to work with. When I run the robot it was too fast so I had to slow the speed and I also did not strap the portable charger so it was just dragged along the robot.
First Milestone
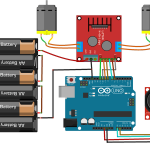
My first milestone is getting the motors running for the robot. This is done by wiring a battery pack to a L298N motor controller. You also have to wire it to the motors and an Arduino. Some issues I had were the wiring because the guides were really unhelpful. I needed to try every combination of wiring the wheels in order the make sure it was according to the code. I also found out that 1 battery pack did not supply enough power so that only 1 wheel would power on. So, I added another battery pack and soldered some of the wires together.
Bill of Materials
- Arduino Uno (https://www.amazon.com/Arduino-A000066-ARDUINO-UNO-R3/dp/B008GRTSV6)
- Robot Kit (any one with wheels works)
- L298N Motor (https://www.amazon.com/Controller-H-Bridge-Stepper-Mega2560-Duemilanove/dp/B01BWLICV4?ref_=fsclp_pl_dp_2)
- PS2 Controller (https://www.amazon.com/TPFOON-Wireless-Vibration-Controller-Playstation/dp/B01DX7S4KE)
- 2xBattery Pack (https://www.amazon.com/Generic-Battery-Holder-Connector-Arduino/dp/B00O5AZI12)
- Portable Charger (pretty much everyone works)