3D Printed Robotic Hand
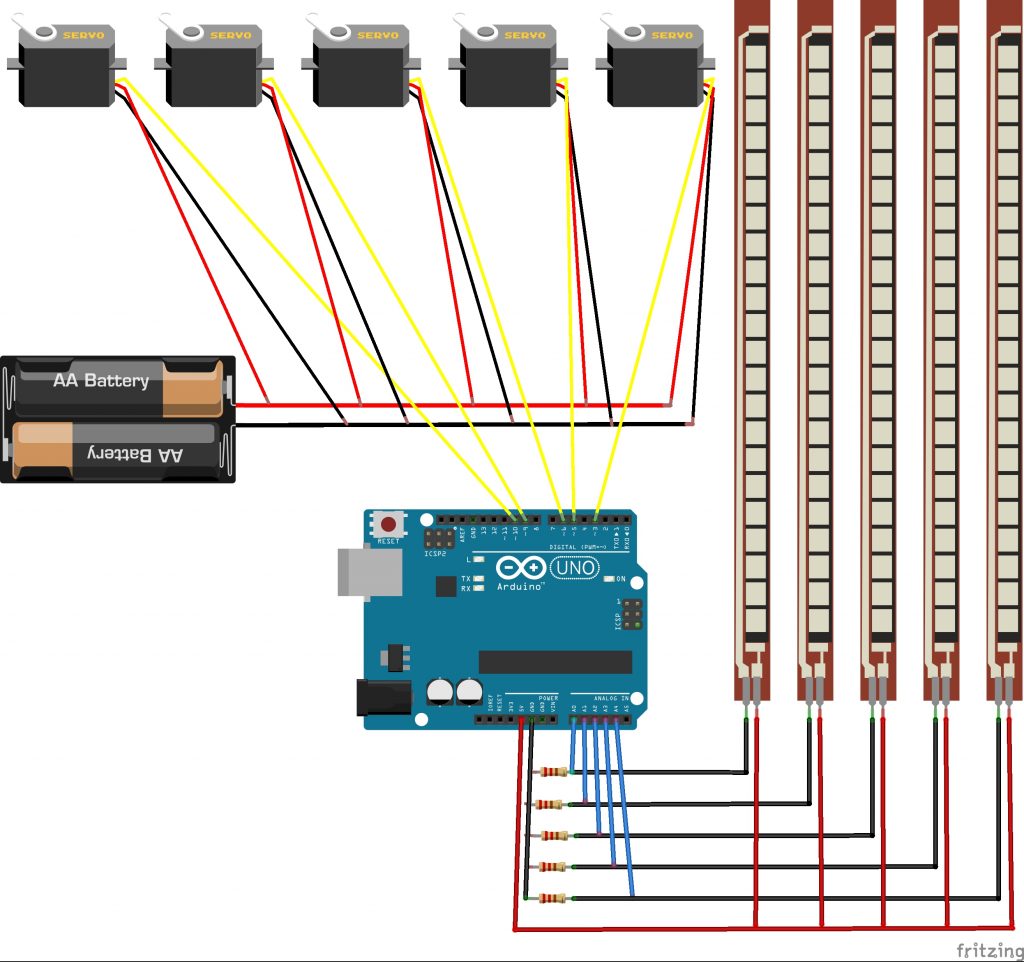
This 3D Printed Robotic Hand bends its fingers accordingly to your movements while wearing a glove with flex sensors. The flex sensors are variable resistors and are attached to one side of a voltage divider. The other side has resistors of a constant value. The Arduino uses the change in voltage when the flex sensors are bent and then triggers the servos to move a proportional amount. The servos pull strings that act like tendons in a hand, allowing the fingers to move.
Engineer
Austin P.
Areas of Interest
Computer Science, Engineering
School
Mission San Jose High School
Grade
Rising Sophomore
Schematic